


W sytuacjach kryzysowych, takich jak poszukiwania ocalałych po zawalonych budynkach, coraz częściej wykorzystuje się roboty zdalnie sterowane.

Wykrywanie potencjalnie niebezpiecznych materiałów, sytuacji z zakładnikami lub innych działań organów ścigania i działań antyterrorystycznych. Ten specjalistyczny sprzęt do zdalnego sterowania wykorzystuje precyzyjne mikrosilniki zamiast ludzi do wykonywania niezbędnych niebezpiecznych operacji, co może znacznie zmniejszyć ryzyko dla zaangażowanego personelu. Precyzyjne posługiwanie się narzędziami i ich obsługa to dwa ważne warunki wstępne.
Wraz z ciągłym rozwojem i udoskonalaniem technologii, roboty mogą być wykorzystywane do bardziej złożonych i wymagających zadań. W rezultacie roboty są coraz częściej wykorzystywane w sytuacjach kryzysowych, które są zbyt niebezpieczne dla ludzi – w ramach operacji przemysłowych, egzekwowania prawa lub działań antyterrorystycznych, takich jak identyfikacja podejrzanych obiektów czy rozbrajanie bomb. Ze względu na tak ekstremalne warunki, te manipulatory muszą być jak najbardziej kompaktowe, aby spełniać określone wymagania. Ich ramiona chwytne muszą umożliwiać elastyczne wzorce ruchu, jednocześnie wykazując precyzję i moc potrzebną do wykonywania szeregu różnych zadań. Kluczową rolę odgrywa również zużycie energii: im wydajniejszy napęd, tym dłuższa żywotność baterii. Specjalne mikrosilniki o wysokiej wydajności stały się ważnym elementem w dziedzinie robotów zdalnie sterowanych, doskonale spełniając te potrzeby.
Dotyczy to również bardziej kompaktowych robotów rozpoznawczych.

Wyposażone w kamery, a czasem nawet rzucane bezpośrednio na miejsce użycia, muszą być odporne na wstrząsy, wibracje, pył i ciepło w potencjalnie niebezpiecznych obszarach. W takim przypadku żaden człowiek nie może od razu udać się do pracy, aby szukać ocalałych. Właśnie to potrafią zrobić pojazdy UGV (bezzałogowe pojazdy naziemne). Dzięki mikrosilnikowi prądu stałego FAULHABER, połączonemu z przekładnią planetarną zwiększającą moment obrotowy, są one niezwykle niezawodne. Niewielkie rozmiary pojazdów UGV pozwalają na bezpieczne przeszukiwanie zawalonych budynków i przesyłają obrazy w czasie rzeczywistym, co czyni je ważnym narzędziem decyzyjnym dla służb ratunkowych w kontekście reagowania taktycznego.
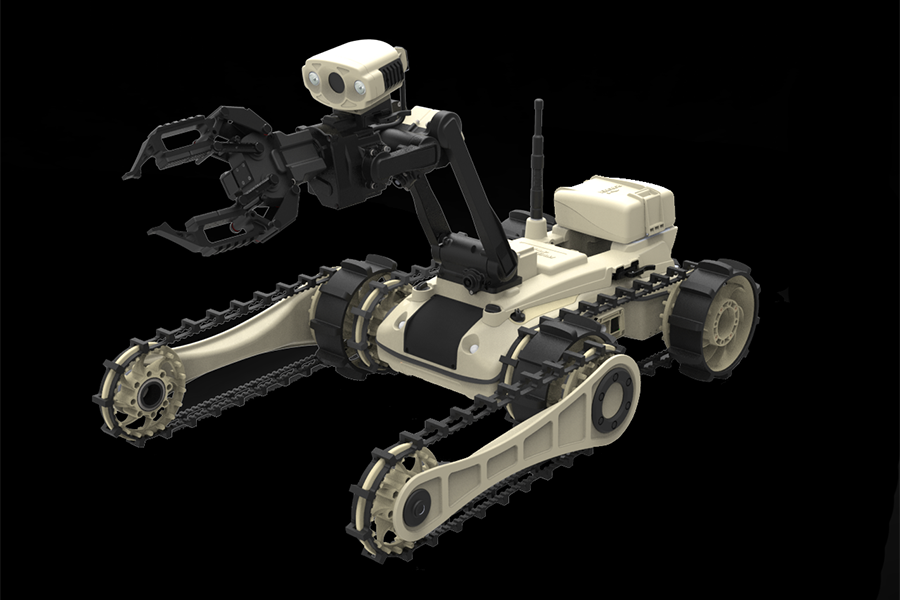
Precyzyjny silnik prądu stałego i przekładnia wykonane z kompaktowego urządzenia napędowego, odpowiedniego do różnorodnych zadań napędowych. Te roboty są wytrzymałe, niezawodne i niedrogie.
Obecnie roboty mobilne są powszechnie stosowane w sytuacjach krytycznych, w których istnieje znaczne ryzyko dla ludzi, a także w niektórych procesach przemysłowych.

Działania organów ścigania lub działania antyterrorystyczne, takie jak identyfikacja podejrzanych obiektów czy rozbrajanie bomb. W tych ekstremalnych przypadkach ci „operatorzy pojazdów” muszą sprostać specyficznym potrzebom. Precyzyjna manipulacja i precyzyjne posługiwanie się narzędziami to dwa podstawowe wymogi. Oczywiście, urządzenie musi być również jak najmniejsze, aby zmieścić się w wąskich przejściach. Siłowniki używane przez takie roboty są oczywiście niezwykłe. Specjalne, wysokowydajne mikrosilniki stały się ważnym elementem.

Trzeba przyznać, że podnoszenie 30 kg na końcu ramienia jest nie lada wyzwaniem.
Jednocześnie, konkretne zadania wymagają precyzji, a nie brutalnej siły. Ponadto, przestrzeń na zespół ramion jest bardzo ograniczona. Dlatego lekkie, kompaktowe siłowniki są niezbędne w chwytakach. Aby sprostać tym wymagającym wymaganiom, należy upewnić się, że chwytak może obracać się o 360 stopni, zachowując jednocześnie wymaganą dokładność i wydajność, umożliwiającą obsługę różnorodnych zadań.
Zużycie energii odgrywa również kluczową rolę w przypadku urządzeń zasilanych bateryjnie. Im wyższa sprawność przekładni, tym dłuższy czas pracy. Problem napędu rozwiązano za pomocą mikrosilnika prądu stałego z przekładniami planetarnymi i hamulcami. Silnik serii 3557 może pracować z mocą do 26 W przy napięciu znamionowym 6-48 V, a wraz z przekładnią predefiniowaną serii 38/2 może zwiększyć siłę napędową do 10 Nm. Całkowicie metalowe przekładnie są nie tylko wytrzymałe, ale także odporne na chwilowe obciążenia szczytowe. Przełożenia hamowania można wybierać w zakresie od 3,7:1 do 1526:1. Kompaktowa przekładnia silnika powinna być ciasno osadzona w górnej części manipulatora. Zintegrowany układ hamulcowy zapewnia pozycję końcową w przypadku awarii zasilania. Ponadto kompaktowe komponenty są łatwe w konserwacji, a uszkodzone części można szybko wymienić. Kolejna kluczowa zaleta: mocne silniki szczotkowe prądu stałego wymagają jedynie prostych regulatorów ograniczających prąd. Informacja zwrotna o natężeniu prądu jest przekazywana na dźwignię zdalnego sterowania poprzez ciśnienie zwrotne, dając operatorowi poczucie siły potrzebnej do użycia chwytaka lub „nadgarstka”. Kompaktowy zespół napędowy składa się z precyzyjnego silnika prądu stałego i przekładni regulacyjnej. Nadaje się do różnych zadań związanych z napędem. Są mocne, niezawodne i tanie. Prosta obsługa silnika standardowego spełnia wymagania dotyczące niskiej ceny, szybkości i niezawodności.