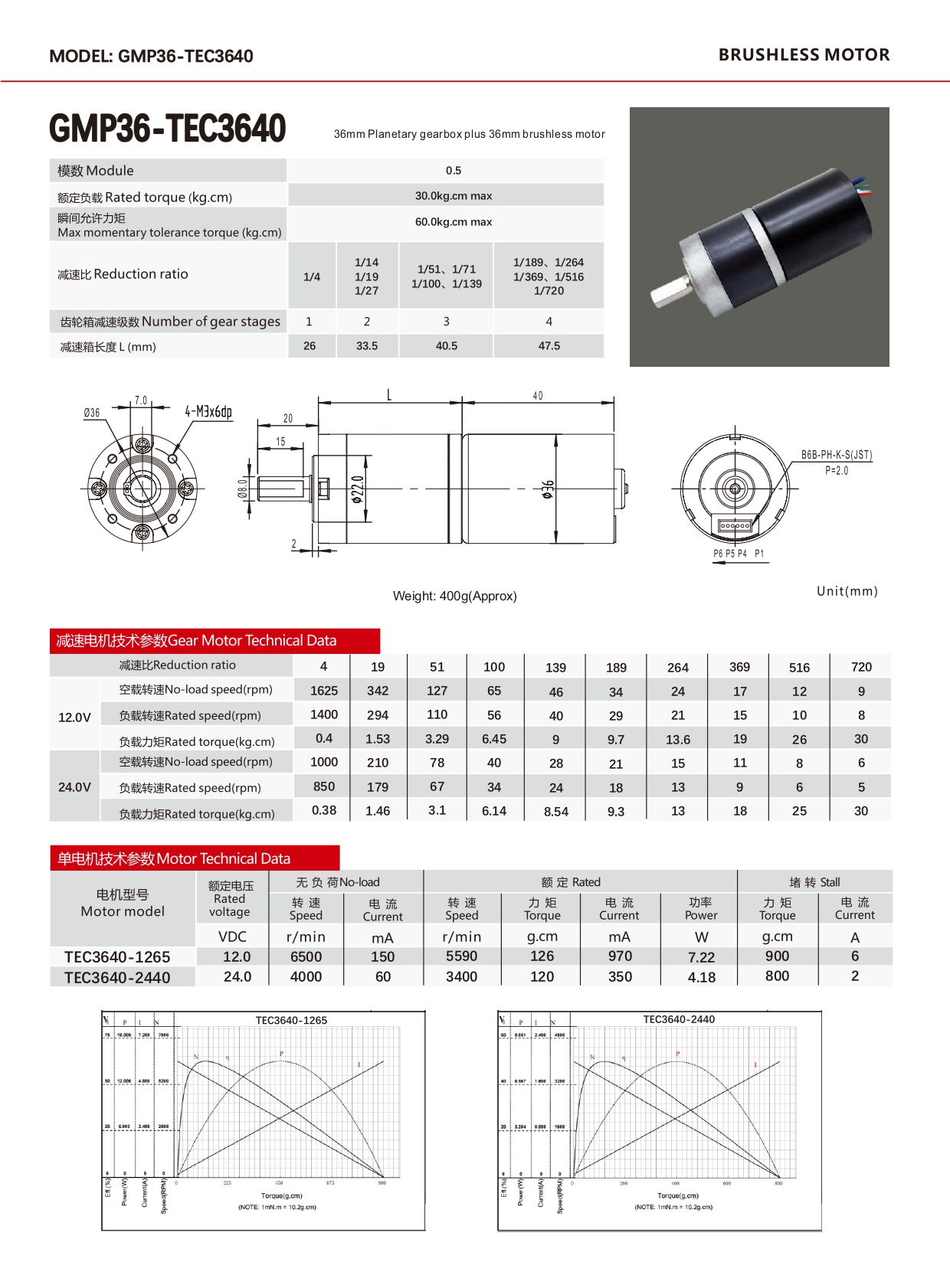
GMP36-TEC3640 36 mm bezszczotkowy silnik planetarny z przekładnią BLDC o wysokim momencie obrotowym 12 V 24 V do automatyki przemysłowej i AGV





Wysoka gęstość momentu obrotowego: 36-milimetrowy silnik bezszczotkowy został zoptymalizowany pod kątem wysokiego strumienia magnetycznego, zapewniając imponujący, ciągły moment obrotowy. Przekładnia planetarna dodatkowo zwiększa ten moment obrotowy, umożliwiając jednostce napędzanie dużych obciążeń przy niskich prędkościach z wysoką sprawnością (typowo >85%).
Niezawodność bezszczotkowa: Dzięki braku szczotek, które mogłyby się zużywać, ten silnik oferuje wyjątkową żywotność (typowo ponad 10 000 godzin) i praktycznie bezobsługową pracę. Generuje również mniej hałasu elektrycznego i jest bardziej wydajny niż alternatywy szczotkowe.
Kompaktowa długość osiowa: Ten silnik przekładniowy o długości zaledwie 40 mm (bez wału) jest zauważalnie krótki w stosunku do swojej średnicy, co czyni go idealnym do zastosowań, w których głębokość jest ograniczona, a szerokość dostępna.
Precyzyjna przekładnia planetarna: Wielostopniowa przekładnia wyposażona jest w hartowane stalowe koła zębate i precyzyjne łożyska, aby zminimalizować luz (typowo <1-2°). Dostępne są różne przełożenia od 5:1 do 500:1, aby dopasować się do wymagań dotyczących prędkości i momentu obrotowego.
Zintegrowane opcje sprzężenia zwrotnego: Czujniki Halla lub enkodery można zintegrować w celu sterowania prędkością i położeniem w pętli zamkniętej. Dostępne są niestandardowe opcje uzwojeń dla systemów 12 V lub 24 V.
Automatycznie prowadzone pojazdy (AGV): Stosowane jako silniki kół napędowych lub siłowniki mechanizmów podnoszenia w robotach magazynowych i pojazdach do transportu materiałów.
Automatyka przemysłowa: Idealna do stołów indeksujących, napędów przenośników i siłowników automatycznych linii montażowych wymagających precyzyjnej kontroli ruchu.
Roboty współpracujące (coboty): Nadają się do siłowników stawów w lekkich cobotach, w których kluczowe znaczenie mają kompaktowość i płynny ruch.
Sprzęt medyczny: stosowany w stołach chirurgicznych, podnośnikach pacjentów i mechanizmach pozycjonujących systemy obrazowania.